Addendum II: Final Trim
Or Project Narcissus, Or Towards Version 1.0
We promised to apply some final adjustments — and promises are to be kept. Hence we return once more for some final trim and polish. Our mission is version 1.0 — and this involves another session of watching Computer Space in videos to ensure we're mirroring the original game fairly accurately.

A mission badge, appropriately paranoid.
(5 is for the fifth letter, as in Echo.)
In order to get things ultimately right, that is, sufficently right for a glorious version 1.0 of our Ironic Computer Space Simulator, we'll have to calibrate our simulation code to the overall impression of the original game. For this we consult, once again, some footage of the Computer Space arcade machine.
And this is what we watch:
Computer Space, gameplay at 23:00 (youtube.com)
Another Computer Space gameplay video (youtube.com)
Yet another Computer Space gameplay video (youtube.com)
Computer Space, FPGA implementation (youtube.com)
And, apart from some ideas on the exact timing, we also return with some new insights. As there are:
- Scoring: Not both of the scores are displayed in hex digits. In fact, only the player's score is advanced beyond 10 and wrapped at 16, while the saucers scores are displayed in plain decimals (wrapped at 10).
- Scoring continues in "Hyperspace Mode" (extra play) without reset.
- Torpedoes, when steered, behave more like with our "eventually follow turn of the ship" option.
- The life of a saucer's torpedo expires faster than we had it, resulting not only in a shorter range but also in more frequent shots (higher cadence).
So we change our code accordingly. Scoring is now done like in the original, but we also include an option (sense switch 6) to override the scoring bug. If this option is enabled, we maintain stores internally without wrap-around and display both of them truncated to a single hexadecimal digit (least significant). We also drop our not so versatile single shots option to make one of the sense switches available for this.
Other, we add a bit of speed to our game by reducing some of the throttle (forced idle cycles) to adjust the overall pace. We're now running at 60 fps plain! As for the fine tuning of the saucers aiming process (game A.I.), we add a second scaling for a near target look-ahead. (This one is applied, if the rocket ship's cumulated offsets are inside a certain range.)
In order to adjust some other parameters, we finally include some kind of debugging tool into our emulator, namely a dialog to live adjust these constants. (The dialog may be displayed by shift- or option-clicking the tiny black button on the bottom right of the bezel of the CRT display.)
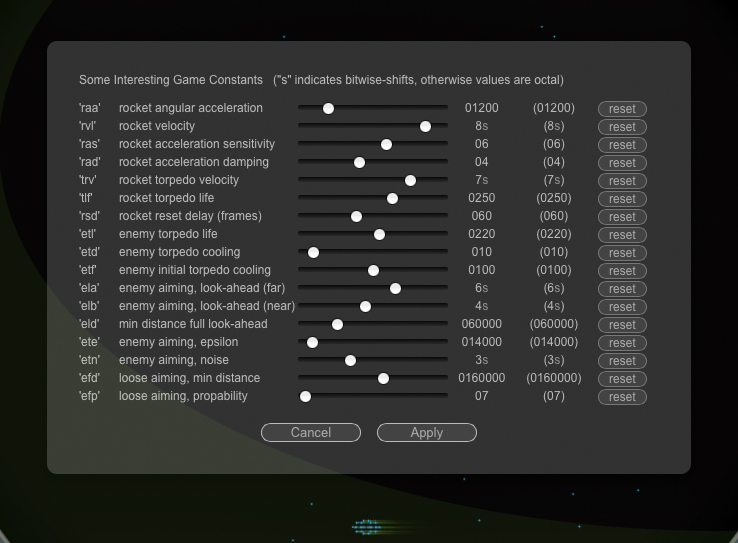
The parameters dialog.
The pace of the game looks about right, with respect to our platform specific requirements, as deriving the speed of the rocket and its torpedos from scaling the unit vector of the rotational angle by shifts, or advancing the saucers with respect to screen locations of the Type 30 CRT display, just right of the Digital Equipment Corporation logo.
By this, we're finally done — version 1.0!
Ironic Computer Space Simulator for the PDP-1, version 1.0.
▶ Experience the game live: www.masswerk.at/icss/.
Hand here it is, in all its glory, our code as of version 1.0, Nov 10, 2016:
Update, Nov 12:
Meanwhile, we even advanced to version 1.1, which adds a timeout to the onscreen display in attract mode to prevent screen burn-in on the real hardware. (Yes, a paper tape is going to be punched soon…)
Update, Nov 23:
And by refining our alternate scoring method we arrive at version 1.2: Scores are now preserved over extra games, but still each extra game has to be won separately in order to continue. (Thus, scores accumulate, but still each play remains a challenge.)
Update, June 1, 2025 [sic!]:
In anticipation of the upcoming PiDP-1 I revisted the game, once again, as some aspects may have been fine for a fun experiment, but may not be that ideal for a game appealing to broader audiences. (At least, there aren't that many arcade games for the PDP-1, as of writing this.)
Major differences are consolidated sense switch options (recommended settings are now the all-off defaults) and reworked score display options, which may have been a bit too cryptic before. Sense switches 5 and 6 control now the score display for the rocket and saucers, respectively. Off is the normal decimal single digital display, as seen on the original arcade game. However, the arcade game is also known to develop a fault, where either the rocket score or the saucers score, or bot are displayed in garbled hex, displaying cryptic glyphs for the excess 4-bit values, as produced by the 7448 BCD-to-7-segment decoder chip. This is what you'll get with the respective sense switch set to on.
In both display modes only the lowest significant digit will be displayed, faithful to the arcade game. Internally, full scores are maintained and players are required to actually beat the saucers on each level in order to proceed to the next overtime (AKA "hyperspace") for extended play. (So, there are no more phony wins on digit wraps.)
ironic computer space simulator 1.3 nl 2025-06-01 mul=mus /instruction code for multiplication div=dis /instruction code for division ioh=iot i /wait for completion pulse (CRT display) szm=sza sma-szf /skip on ac zero or minus spq=szm i /skip on ac plus and not zero define initialize A,B law B dap A term define index A,B,C idx A sas B jmp C term define swap rcl 9s rcl 9s term define load A,B lio (B dio A term define setup A,B law i B dac A term define count A,B isp A jmp B term /macros specific to the program define scale A,B,C lac A sar B dac C term define random lac ran rar 1s xor (355671 add (355671 dac ran term / Computer Space / Original arcade game by Nolan Bushnell and Ted Dabney, / Syzygy Engineering / Nutting Associates, 1971. / 'A simulated space battle that pits / computer-guided saucers against / a rocket ship that you control.' / Ironic Computer Space Simulator for PDP-1, Norbert Landsteiner, 2016/2025 / initial release 2016-11-10, v. 1.3 2025-06-01 / vers. 1.3: / - consolidated sense switch options to preferred defaults (all off) / - reworked score display options (digital or hex for rocket and/or saucers) / sense switch options / SSW 1 ... background effect / off - parallax, background stars move relatively to rocket ship. / on - stars scroll continuously to the left. / SSW 2 ... torpedo agility (steering) / off - normal. / on - agile. / SSW 3 ... saucer motion / off - diagonals are horizontally stretched. / (conforms more to the overall impression of original CS) / on - geometrical diagonals. / SSW 4 ... saucer piloting, which saucer is shooting? / off - always the same one (as in original CS). / on - random select. / SSW 5 ... score display rocket / off - decimal (normal). / on - emulate garbled hex display bug. / SSW 6 ... score display saucer / off - decimal (normal). / on - emulate garbled hex display bug. / input / control word in io as follows (like spacewar), / 'high order 4 bits, rotate ccw, rotate cw, ire rocket, and fire torpedo. / Low order 4 bits, same for other ship.' 3/ jmp sbf / ignore seq. break jmp a0 / start addr, use control boxes jmp a1 / alt. start addr, use testword controls /game parameters raa, 6, 1200 / rocket angular acceleration rvl, 7, sar 8s / scaling rocket velocity ras, 10, law i 6 / rocket acceleration sensitivity (skip) rad, 11, law i 4 / rocket acceleration damping (averaging) trv, 12, sar 7s / scaling torpedo velocity tlf, 13, law i 250 / torpedo life rsd, 14, 60 / rocket reset delay (frames) etl, 15, law i 220 / enemy torpedo life etd, 16, law i 10 / enemy torpedo cooling (frames) etf, 17, law i 100 / enemy first torpedo cooling (after score) ela, 20, sal 6s / scaling enemy torp look-ahead, far elb, 21, sal 4s / scaling enemy torp look-ahead, near eld, 22, 60000 / min distance full look-ahead ete, 23, 14000 / epsilon for enemy aiming etn, 24, sal 3s / scaling noise for enemy torpedo aim efd, 25, 160000 / min distance for loose aiming efp, 26, 7 / probability of loose aiming efe, 27, 140000 / epsilon for loose aiming rto, 30, law i 450 / game restart delay (frames blocking input) ran, 31, 0 / random number /adjust these three parameters for timing ith, 32, 60 / throttle (idle cycles / 3) ifs, 33, 74 / frames per second for time keeping isd, 34, 43120 / onscreen score display timeout (5 x 60 x ifs = 5 min) /timing constants (avr. cycles / 3) irk, 310 / rocket routine isc, 360 / saucer routine isx, 440 / saucer explosion idp, 60 / score display /saucer movement table (dy, dx), one screen loc = 0400 / horizontally streched diagonals, default (dy, dx) ut0, 600 0 -600 0 0 600 0 -600 400 600 -400 600 400 -600 -400 -600 / diagonals proper ut1, 600 0 -600 0 0 600 0 -600 400 400 -400 400 400 -400 -400 -400 /saucer torpedo movement table (dy, dx) emt, 2400 0 -2400 0 0 2400 0 -2400 1600 1600 -1600 1600 1600 -1600 -1600 -1600 /character display grid units (for character outline compiler) / (display positions are derived automatically at start up) cgy, 7000 /unit for character grid y cgx, 5000 /unit for character grid x . 3/ /reserve space for x-unit offsets 2..4 /routine to flush sequence breaks, if they occur. sbf, tyi lio 2 lac 0 lsm jmp i 1 /sine-cosine subroutine - Adams associates 1961 /calling sequence= number in AC, jda sin or jda cos. /argument is between +/- +2 pi, with binary point to right of bit 3. /answer has binary point to right of bit 0. Time = 2.35-? ms. /changed for auto-multiply , ddp 1/19/63 cos, 0 dap csx lac (62210 add cos dac sin jmp .+4 sin, 0 dap csx lac sin spa si1, add (311040 sub (62210 sma jmp si2 add (62210 si3, ral 2s mul (242763 dac sin mul sin dac cos mul (756103 add (121312 mul cos add (532511 mul cos add (144417 mul sin scl 3s dac cos xor sin sma jmp csx-1 lac (377777 lio sin spi cma jmp csx lac cos csx, jmp . si2, cma add (62210 sma jmp si3 add (62210 spa jmp .+3 sub (62210 jmp si3 sub (62210 jmp si1 /character outline compiler /character outlines / 7 rows at 5 dots, left to right, top down, / 2 words per character, aligned left. cot, 350614 306134 /0 106041 020410 /1 350411 442076 /2 350411 406134 /3 451227 610204 /4 770207 406134 /5 350607 506134 /6 760421 041020 /7 350613 506134 /8 350613 604230 /9 000003 702036 /A 000007 404174 /B 010617 600000 /C 370203 600036 /D 010207 702036 /E 000000 000076 /F / hex patterns as generated by the 7448 BCD-to-7-segment decoder: / (compare sense switch options 5 and 6) / / A (10) B (11) C (12) D (13) E (14) F (15) / / –- / | | | | / -- -- -- –- –- / | | | / -- -- –- -- -- coa, . 21/ /space for addresses of character object code /setup and compile digits 0-9, chars A-F ci, dap cix lac cgx /set up grid units (1..4) add cgx dac cgx 1 add cgx dac cgx 2 add cgx dac cgx 3 ci2, dzm \t1 /compile outlines law ctb dap ci4 law coa dap ci5 cla ci3, dac . 4 /fix up character index ci4, law . /start address of compiled code (fixed up) ci5, dac . /store start address (fixed up) jda cc 0 /character index (fixed up) dap ci4 idx ci5 idx \t1 sas (21 jmp ci3 cix, jmp . /character outline compiler / call law addr, jda cc, char-index (see cot) / returns next address in ac, compiled code will exit at cdx define comp A /push instr. A to object code lac A dac i cc idx cc term define cadd A /add instr. A to ac and push to object code add A dac i cc idx cc term cc, 0 dap ccx lac i ccx /get char-index sal 1s add (cot dac \cwd /addr. of first code word idx ccx /fix up return address stf 6 /flag 6 for first dot law i 22 dac \cbi /bit counter lio i \cwd /get first code word to parse comp (lio cy /- reset y dzm \cyi comp (lac cx /- reset x dzm \cxp /current x ccr, dzm \cxi /new row spi i /is there a dot? jmp ccs /no lac \cxi /get offset to last x sub \cxp sza i jmp ccd spa jmp ccm cadd (add cgx-1 jmp cca ccm, cma cadd (sub cgx-1 cca, lac \cxi dac \cxp ccd, szf 6 jmp cd1 comp (ioh /- wait for display cd1, comp (dpy -4000 100 /- display a dot clf 6 ccs, ril 1s /advance to next bit isp \cbi jmp cci law i 22 /fetch next code word dac \cbi idx \cwd lio i \cwd cci, idx \cxi sas (5 /end of a row? jmp ccr 1 /no idx \cyi /next row sad (7 /was it the last one? jmp ccz /trail and exit comp (rcr 9s /- swap comp (rcr 9s comp (sub cgy /- increment pos y comp (rcr 9s /- swap comp (rcr 9s jmp ccr ccz, szf 6 jmp cz1 comp (ioh cz1, comp (jmp cdx ccx, jmp . /return cx, 0 cy, 0 /display a character / call law char-index, jda cd (coors in cx, cy) cdp, 0 dap cdx law coa add cdp dap . 1 jmp i . cdx, jmp . /subroutines for background display nos=77 /number of stars /table of stars coors (nos words, 9 bits x and 9 bits y) bst, . nos/ /setup (nos random coors starting at bst) bsi, dap bsx init bsc, bst /deposit first addr of bst in bsc bsl, random /new random number to repersent both coors bsc, dac . /store it in current loc of bst index bsc, (dac bst+nos, bsl /increment bsl, repeat at bgl for nos times dzm bgh /reset bg offsets dzm bgv bsx, jmp . /return /display background stars (displays every 2nd frame only) bg, dap bgx lac \frc /check frame conter and (1 sza /skip every second frame jmp bgi /jump to star display lac \gms /force slow movement in attract mode spq jmp bgd szs 10 /sense switch 1 for parallax effect off (slow scrolling) jmp bgd lac \rdx sar 1s add \rdx sar 3s cma add bgh dac bgh lac \rdy sar 1s add \rdy sar 3s cma add bgv dac bgv jmp bgx /return bgd, lac \frc /advance x offset slowly and (177 sza jmp bgx law i 400 add bgh dac bgh jmp bgx /return bgi, init bgl, bst /init bgl to first addr of stars table bgl, lac . /get coors of next star (x/y) cli /clear io scr 9s /shift low 9 bits in high 9 bits of io (x) sal 9s /move remaining 9 bits in ac in high part (y) add bgv /add vertical offset swap /swap contents of ac and io add bgh /add horizontal offset dpy-i /display a dot at coors in ac (x) and io (y) index bgl, (lac bst+nos, bgl /repeat the loop at bgl nos times bgx, jmp . /return bgh, 0 bgv, 0 / start /cut here for two source tapes /ironic computer space simulator 1.3 pt. 2 nl 2025-06-01 /here from start a0, law rcb /configure to read control boxes (sa 4) dap rcw jmp a2 a1, law rtw /configure to read testword (sa 5) dap rcw /initial setup a2, jsp ci /run character outline compiler lac cgx /configure positions for score display sal 3s sub cgx cma dac \t1 /-7 x add (377777 /right margin dac \d0x /right pos = margin - 7 x (2 x offset) add \t1 dac \d1x /left pos = margin - 14 x (2 x spacing) lac cgy sal 3s sub cgy sar 1s dac \d1y /vertical middle pos = 7/2 y (centered) sal 2s sub cgy dac \d0y /top pos = 13 y (3 y spacing) cma add \d1y add \d1y dac \d2y /bottom pos = 6 (3 y spacing) lac irk /configure cycle count budget add isc add idp add ith cma dac \ifr lac isd /get timeout for onscreen display in attract mode cma dac \scc /counter for onscreen scores timeout jsp a3 /setup rest of the game dzm \gms /game status to attract mode /main loop fr0, lac \ifr /initial instruction budget (delay) dac \ict idx \frc /increment frame counter (only least significant bits used) clf 1 /flag 1 indicates active player's ship clf 2 clf 3 jsp bg /display background lac \gms /in attract mode? spq jmp at0 /yes lac \hpm /check hyperspace mode (extended play) sma /activated? jmp ffg /no law 2000 /display moving dots at the bottom add \hpc / as an indicator (in stead of reverse video) dac \hpc lio (-377000 dpy -4000 /display a dot cma /mirror x ioh /wait for the crt dpy -i /and display another one ffg, jsp rkt /rocket routine jsp ufo lac \trs sza jsp trp /torpedo routine lac \ets sza jsp etm /enemy torpedo routine jsp df /check collisions idx \fdc /manage time sas ifs jmp fr2 dzm \fdc idx \fd0 sas (12 jmp fr2 dzm \fd0 idx \fd1 sas (12 /overflow of second timer digit? jmp fr2 /no ff0, dzm \fd1 /game over, check scores lac \sc1 /rocket score sub \sc2 /saucer score sub \sco /subtract score offset dac \t1 /and store new offset szm /winner? jmp fng /yes, continue xct rto /change to attract mode (get restart delay) dac \gms lac isd /reset timeout for onscreen display cma dac \scc lac \rks /get rocket state sza /active? jmp ff1 /yes, start a final spinning animation add rsd /check, if spinning sma /animation done? dzm \rks /yes, disable rocket jmp fr1 ff1, law ff2 /fix up return address for df-routine dap dfx / to setup a final spin of the rocket stf 5 /set flag 5, do not respawn saucers lac \sc2 /backup saucers' score dac \t1 lac \ds2 dac \t2 jmp dxr /reset rocket to spin ff2, lac \t1 /undo score increment done in dxr dac \sc2 lac \t2 dac \ds2 jmp fr1 fng, lac \hpm /continue for a new game (extra play) cma /flip 'hyperspace mode' dac \hpm dzm \hpc /reset counter for 'hyperspace' animation lac \t1 /store current score offset dac \sco jmp fr2 at0, /attract mode lac \rks /check rocket state sma /spinning? jmp . 5 /no jsp rkt lac \rks /check again for setup delay add rsd sma /spinning done? dzm \rks /yes, disable rocket jsp i rcw /new game on any input dio \cw random isp \gms /countup to prevent accidental restart jmp at1 dzm \gms lac \cw xor \cwo sza i jmp at1 jsp a3 /restart law i 20 dac \rks law 1 dac \gms jmp fr2 at1, jsp ufo fr1, isp \scc /increment score display counter jmp fr2 dzm \scc /prevent run around spa fr2, jsp scd /display scores lac \cw /backup control input for comparison dac \cwo fr3, count \ict, . /use up rest of time of main loop jmp fr0 /next frame /score display scd, dap scx lac \d0x dac cx lac \d0y dac cy lac \sc1 and (17 szs i 50 /sense switch 5 for rocket hex display lac \ds1 jda cdp lac \d1y dac cy lac \sc2 and (17 szs i 60 /sense switch 6 for saucer hex display lac \ds2 jda cdp lac \d2y dac cy lac \fd0 jda cdp lac \d1x dac cx lac \fd1 jda cdp lac \ict add idp dac \ict scx, jmp . /start a new game a3, dap ax jsp bsi /setup bg-stars dzm \fd0 /reset counters for time display dzm \fd1 dzm \fdc dzm \rks /rocket status to inactive dzm \hpm /reset 'hyperspace mode' dzm \sco /reset score offset (for alternate scoring) /rocket setup ar, lac (670000 dac \rth /rotational angle dac \th0 lac (-200000 dac \rpx /pos x cma dac \rpy /pos y law 140 dac \rdx law i 440 dac \rdy dzm \rac /acceleration skip counter dzm \rxc /reset center offset dzm \ryc dzm \sc1 /score dzm \ds1 dzm \trs /torpedo status counter dzm \cwo /old control word /saucer setup au, random dac \upy /pos y random sar 4s add (140000 dac \upx /pos x dzm \udc /animation skip counter law 1 dac \udd /animation direction dzm \umo /direction code dzm \udy /delta y dzm \udx /delta x law i 10 dac \ufc /duration of movement law 1 dac \uft /speed of center animation (1,3) dac \ufs /state counter law i 1 dac \umo dzm \sc2 dzm \ds2 dzm \ets /torpedo state jsp etr /get torpedo cooling (\etc) ax, jmp . /collision / hit detection df, dap dfx lac \ufs /check saucer state spq /skip on positive jmp dfx lac \rks /check rocket state spq jmp dfx clf 5 lac \rpx /get rotational center of rocket sub \rxc dac \px lac \rpy add \ryc dac \py law \px /set up rocket for comparison dap mx1 law \py dap my1 lac (21000 /set up collision radii (x 34, y 24) in screen locs dac \dxe sar 1s dac \de2 lac (14000 dac \dye law \upx /first saucer dap mx2 law \upy dap my2 jsp dmf /compare them sza /hit? jmp dxr /yes lac \upy /second saucer sub (400000 /vertical offset dac \vpy law \vpy dap my2 jsp dmf /compare them sza /hit? jmp dxr /yes dft, lac \trs /torpedo active? sma jmp dfe lac (12200 /setup hit box (x 21, y 10) dac \dxe sar 1s dac \de2 lac (5000 dac \dfy law \tpx /set up torp as first object dap mx1 law \tpy dap my1 jsp dmf /compare first saucer sza jmp dxu /hit, respawn law \upy /second saucer dap my2 jsp dmf /compare them sza /hit? jmp dxu dfe, lac \ets /enemy torpedo active? sza i jmp dfx lac (11000 dac \dxe dac \dye law 6400 dac \de2 law \px dap mx1 law \py dap my1 law \epx dap mx2 law \epy dap my2 jsp dmf sza i jmp dfx dzm \ets /reset enemy torpedo xct etf /get initial topredo cooling dac \etc /and store it lac stf 5 dxr, law i 100 /set rocket state to collision sub rsd /additional delay before reset dac \rks dzm \rdx dzm \rdy dzm \trs lac \rth dac \th0 dzm \thc law i 10 dac \thd idx \sc2 idx \ds2 sub (12 /wrap score around at decimal 10 sma dzm \ds2 szf 5 /was it a saucer-rocket collision? jmp dfx /no dxu, dzm \trs /set up saucer explosion, reset torpedoes dzm \ets lac i my2 /set up pos y dac \upy idx \sc1 idx \ds1 sub (12 /wrap score around at decimal 10 sma dzm \ds1 jsp uxs dfx, jmp . /return /subroutine to compare object positions (from spacewar, mod n.l.) dmf, dap dmx mx1, lac . /calc if collision mx2, sub . /delta x spa /take abs val cma dac \t1 sub \dxe / < epsilon x ? sma jmp dm0 /no my1, lac . my2, sub . spa cma sub \dye / < epsilon y ? sma jmp dm0 /no add \t1 sub \de2 / < epsilon 2 ? sma jmp dm0 law 1 /return 1 (in ac) for hit jmp dmx dm0, cla /return 0 for miss dmx, jmp . /saucers ufo, dap ufx lac \ufs spq jmp uxe clf 6 lac \upx /update position add \udx dac \upx dac \px lac \upy add \udy dac \upy dac \py jsp sd /display first saucer lac \py sub (400000 /half-screen vertical offset dac \py jsp sd /display second saucer isp \ufc /increment leg counter jmp uf1 /continue lac \umo /new direction spa jmp uza /we're in a 3-steps stop (\umo: -3..-1) sar 3s / 010 set for single step stop sza jmp uz1 random sma jmp uf2 /set up new leg dzm \udx /stop dzm \udy lac ran /what kind of stop will it be? ral 3s spa jmp uz0 /three-steps stop law 10 /single-step stop, keep center animation dac \umo jmp uzb /get delay and continue uz0, law i 3 /first period of three-steps stop dac \umo /reuse \umo as step counter (negative) law 3 dac \uft /set animation to slow (3) uzb, jsp utd /get duration sar 1s dac \ufc jmp eta /continue for torpedo setup uza, cma /3-steps stop, dispatch on -\umo (-3..-1) add (. 3 dap . 2 idx \umo jmp . jmp uz1 jmp uz2 uz3, dzm \udd /3 - stop animation jmp . 2 uz2, jsp ucd /2 - still stopped, new animation direction jsp utd sar 1s dac \ufc jmp eta uz1, stf 6 /1 - start over, but keep animation random jmp . 2 uf2, clf 6 /set up for a new leg (flag 6: keep anim. dir.) and (7 dac \umo /new motion code (0..7) sal 1s /read corresponding dx/dy form movement table szs i 30 /sense switch 3 to select table (ut1 or ut0) jmp . 3 add (ut1 /setup reference location for dy in \t1 jmp . 2 add (ut0 /select other table dac \t1 lac i \t1 /load dy from addr. in \t1 dac \udy idx \t1 /increment addr. in \t1 lac i \t1 /load dx from addr. in \t1 dac \udx szf 6 i /skip next on flag 6 jsp ucd /set new direction for animation jsp utd /get delay dac \ufc lac \umo sma jmp . 4 lac \ufc /shorter delay on stops sar 1s dac \ufc uf1, lac \frc /increment center animation and \uft sza jmp eta lac \udc /udc = 0..5 sub \udd dac \udc sma jmp . 4 law 5 dac \udc jmp eta sad (6 dzm \udc jmp eta ufi, lac \ict /update instruction count add isc dac \ict ufx, jmp . ucd, dap ucx /subroutine to set center animation lio ran ril 1s law 1 spi cma dac \udd lac ran /animation speed, favor faster rar 9s and (3 sza jmp . 3 law 1 jmp . 2 law 3 dac \uft ucx, jmp . utd, dap utx /subroutine to get random delay (leg length) random sar 9s sar 3s sub (270 utx, jmp . urs, dap urx /subroutine to respawn the saucers lac ran /pos x, get random number sar 1s /scale it to less than half a screen size dac \upx sar 3s sub \upx add \rpx /add player's x position + half screen size add (400000 dac \upx /x now nearly random, but not too close to the player random /random pos y dac \upy jsp ucd /set up center animation dac \udd law i 40 /set up delay before next leg dac \ufc law i 1 /stopped (end of 3-steps stop) dac \umo jsp etr /reset torpedo, get cooling law 1 /set state to active dac \ufs urx, jmp . /saucer explosion /setup (compare saucer display at sd) upt, . 64/ /table for particle coordinates (y, x) upd, . 64/ /table for particle deltas (dy, dx) uxo, 500 200 /particle start offset coors (scaled saucer outline) 340 340 340 740 -500 200 -340 340 -340 740 -500 -200 -340 -340 -340 -740 500 -200 340 -340 340 -740 0 1240 0 -1240 0 740 0 640 0 540 0 440 0 200 0 100 0 -100 0 -200 0 -440 0 -540 0 -640 0 -740 uxs, dap usx law upt /address of coors table dac \upc law uxo /address of outline table dac \uxc usp, lac \upy /set up pairs of coors add i \uxc dac i \upc idx \uxc idx \upc lac \upx add i \uxc dac i \upc idx \uxc idx \upc sas (upd jmp usp clf 5 /set up 4 x 3 pairs of directional deltas clf 6 / for the hull law upd /address of deltas table dac \upc law i 4 dac \sdc usi, law i 3 dac \uxc usj, random /new random number cli rcr 9s /split it sal 2s szf 6 cma dac i \upc idx \upc cla rcl 6s szf 5 cma dac i \upc idx \upc isp \uxc jmp usj law us0 /dispatch on \sdc (-4..-1) for passes (set flags) sub \sdc dap us0 idx \sdc /increment counter and jump us0, jmp . jmp us1 jmp us2 jmp us3 stf 6 /2nd pass jmp usi us3, stf 5 /3rd pass jmp usi us2, clf 6 /4th pass jmp usi us1, dzm i \upc /done, set up rim sides idx \upc random cli rcr 9s add (1000 dac i \upc idx \upc dzm i \upc idx \upc cla rcl 9s add (1000 cma dac i \upc idx \upc usk, random /set up remaining deltas (center rim) cli scr 9s sar 1s dac i \upc idx \upc cla rcl 8s sal 1s spi cma dac i \upc idx \upc sas (uxo jmp usk law i 27 /duration of explosion dac \ufs usx, jmp . /return /saucer explosion display / jump here from inside ufo uxe, isp \ufs jmp . 3 jsp urs /last iteration, respawn saucers jmp ufx / and exit law upt /move and dsisplay particles dac \upc law upd dac \uxc uxi, clf 5 random and (400001 sza stf 5 lac i \uxc add i \upc dac i \upc swap idx \uxc idx \upc lac i \uxc add i \upc dac i \upc szf 5 dpy -i 100 idx \uxc idx \upc sas (upd jmp uxi lac \upy /display other saucer add (400000 dac \py lac \upx dac \px jsp sd add \ict lac isx dac \ict jmp ufx /saucer torpedo ai (setup) / here from inside ufo eta, lac \ets /torpedo already active? spa jmp ufi szf i 1 /rocket active? jmp ufi lac \ufs /saucers active? spq jmp ufi isp \etc /count up cooling jmp ufi dzm \etc lac \upx /position of tubes add (10400 dac \epx lac \upy sub (3400 dac \epy random /get random offset for targeting cli scr 9s /split it into lower parts of ac and io sir 9s xct etn /scale it dac \exn /store noise x swap /same for y xct etn dac \eyn szs i 40 /sense switch 4 to select saucer at random jmp et1 / original shoots always from same saucer random sma /which saucer jmp et1 lac \epy add (400000 dac \epy et1, lac ete dac \eps lac \rpx /get cumulated offsets sub \epx spa cma dac \t1 lac \rpy sub \epy spa cma add \t1 dac \t1 sub eld /near? spa jmp . 3 /no law elb jmp . 2 law ela dac \t2 lac \rdx xct i \t2 /look-ahead add \rpx sub \rxc add \exn sub \epx dac \dx /delta x spa cma dac \adx /abs delta x lac \rdy /same for y xct i \t2 add \rpy add \ryc add \eyn sub \epy dac \dy spa cma dac \ady lac \umo /check loose aiming conditions and (7 spq /moving? jmp et2 /no lac \t1 sub efd spa /big enough? jmp et2 /no random /handle probabilty spa cma sub efp sma /aim loosely? jmp et2 /no lac efe dac \eps et2, lac \ady sub \eps spa jmp eah lac \adx sub \eps spa jmp eav lac \adx sub \ady spa cma sub \eps sma jmp ufi ead, law 4 lio \dy spi law 5 lio \dx spi add (2 jmp et3 eah, law 2 lio \dx spi law 3 jmp et3 eav, cla lio \dy spi law 1 et3, sal 1s /read corresponding dx/dy form movement table add (emt /setup reference location for dy in \t1 dac \t1 lac i \t1 /load dy from addr. in \t1 dac \edy idx \t1 /increment addr. in \t1 lac i \t1 /load dx from addr. in \t1 dac \edx xct etl dac \ets eti, jmp ufi /return to ufo /saucer torpedo movement routine etm, dap etx isp \ets /count up life jmp . 2 jmp etr 1 /expired lac \epy add \edy dac \epy swap lac \epx add \edx dac \epx dpy -i 100 etx, jmp . /return etr, dap etx /reset dzm \ets xct etd dac \etc jmp etx /player rocket routine rkt, dap rkx lac \rks /check for collision state sza i jmp rkx szm / < 0 ? jmp rka /no isp \rks /manage rocket hit state jmp rke idx \rks lac \th0 dac \rth jmp rcw rke, add rsd sma jmp rkx rt1, lac \thc /animate collision, spin clockwise progressively dac \thn lio raa /angular acceleration rt2, sil 1s isp \thn /shift left \thd times jmp rt2 isp \thd jmp rt3 law i 20 /add another shift every 20 frames dac \thd lac \thc sub (1 dac \thc rt3, swap cma cli -opr /make it a clockwise spin, clear io add \rth /update rotational angle jmp rkr rka, stf 1 /start active rocket rcw, jsp . /read control word (ccw, cw, trust, fire) dio \cw /merge (or) spacewar player inputs cla rcr 4s ior \cw dac \cw lio \cw /parse and process rotation lac \rth /load angle spi /sign cleared in io? add raa /no, add angular acceleration ril 1s /next bit spi sub raa rkr, sma /normalize 0 >= angle >= 2Pi (0311040) sub (311040 spa add (311040 dac \rth /update angle ril 1s /parse thrust input spi stf 2 /set flag 2 for thrust ril 1s spi /check next bit for fire stf 3 /set flag 3 for torp jda sin /get sin, store it in \sn dac \sn lac \rth jda cos /get cos, store it in \cs dac \cs szf i 2 /flag 2 set? update dx / dy jmp rk0 lac \frc /load frame counter isp \rac /sensitivity, frame skip jmp rk1 xct ras /reset counter dac \rac lac \sn /dx cma xct rvl /apply scaling for acceleration swap /swap result into io xct rad /damping, get loop count dac \rdc rx0, swap /get intermediate value from io add \rdx /average with old dx sar 1s swap /swap into io isp \rdc /increment loop jmp rx0 dio \rdx /store updated dx lac \cs /same for dy xct rvl swap xct rad dac \rdc ry0, swap add \rdy sar 1s swap isp \rdc jmp ry0 dio \rdy jmp rk1 rk0, dzm \rac rk1, scale \sn, 4s, \sn1 /get position of rocket tip sar 2s /offset x = (sin >> 4) - (sin >> 8) cma add \sn1 dac \sn1 scale \cs, 4s, \cn1 /offset y = (cos >> 4) - (cos >> 8) sar 2s cma add \cn1 dac \cn1 lac \rpx /update pos x (add dx) add \rdx dac \rpx sub \sn1 /subtract offset for tip, store it in \px dac \px lac \rpy /same for y add \rdy dac \rpy add \cn1 dac \py scale \sn1, 1s, \rxc /store half-offset for hit detection scale \cn1, 1s, \ryc scale \sn, 6s, \sn8 /scaled sine, 8 steps sar 1s dac \sn4 /4 steps sar 1s dac \sn2 /2 steps sar 1s dac \sn1 /1 step dac \sm1 add \sn2 dac \sn3 /3 steps dac \sm3 add \sn2 dac \sn5 /5 steps add \sn1 dac \sn6 /6 steps dac \sm6 scale \cs, 6s, \cn8 /scaled cosine, 8 steps sar 1s dac \cn4 /4 steps sar 1s dac \cn2 /2 steps sar 1s dac \cn1 /1 step dac \cm1 add \cn2 dac \cn3 /3 steps dac \cm3 add \cn2 dac \cn5 /5 steps add \cn1 dac \cn6 /6 steps dac \cm6 jsp rod /display it szf i 3 /fire torpedo? jmp rkq /no szf i 1 /are we active? jmp rkq /no lac \trs sza /torpedo already active? jmp rkq /yes lac \ufs spq /saucers active? jmp rkq /no xct tlf /set up torpedo dac \trs lac \rpx /copy position dac \tpx lac \rpy dac \tpy lac \sn /dx cma xct trv /apply scaling for velocity dac \tdx lac \cs /dy xct trv dac \tdy rkq, szf i 2 /advance random on thrust jmp rki / to prevent patterned behavior of saucers random rki, lac \ict /update instruction count add irk dac \ict rkx, jmp . /torpedo (rocket) trp, dap trx isp \trs /count up status counter (zero = inactive) jmp . 2 trx, jmp . szf i 1 jmp tr1 lac \frc /frame skip and (3 szs 20 /sense switch 2 for agile torpedos (better respond) and (1 sza jmp tr1 lac \cs /update with steering xct trv /scale cos of rocket add \tdy /average 3 times with current dy sar 1s add \tdy sar 1s dac \tdy /store updated dy add \tpy /update pos y dac \tpy swap lac \sn /same for sine, dx and pos x cma xct trv add \tdx sar 1s add \tdx sar 1s add \tdx sar 1s dac \tdx add \tpx dac \tpx dpy -i /display adot and jump to return jmp trx tr1, lac \tpy /no steering, simple update add \tdy dac \tpy swap lac \tpx add \tdx dac \tpx dpy -i jmp trx /control word get routines /read control boxes rcb, dap rcx cli iot 11 rcx, jmp . /read testword rtw, dap rtx lat swap rtx, jmp . /sprite routines /rocket display / step rearwards - x add \sn1, y sub \cn1 / step outwards - x add \cm1, y add \sm1 / step inwards - x sub \cm1, y sub \sm1 define disp dpy-i 100 /display a dot at brightness level +1 term rod, dap rox stf 6 /set flag 6 lac \px lio \py disp rop, swap /y +4, x +6 sub \cn4 add \sm6 swap add \sn4 add \cm6 disp swap /y +5, x +3 sub \cn5 add \sm3 swap add \sn5 add \cm3 disp swap /y +6, x +1 sub \cn6 add \sm1 swap add \sn6 add \cm1 disp swap /y +6, x -1 sub \cn6 sub \sm1 swap add \sn6 sub \cm1 disp swap /y +8, x +6 sub \cn8 add \sm6 swap add \sn8 add \cm6 disp swap /y 3, x -10 sub \cn3 sub \sm3 sub \sm6 sub \sm1 swap add \sn3 sub \cm3 sub \cm6 sub \cm1 disp swap /y +7, x +6 sub \cn8 add \cn1 add \sm6 swap add \sn8 sub \sn1 add \cm6 disp szf i 6 /flag 6 set? (skip on not zero) jmp rot clf 6 /clear flag 6 lac \cm1 /invert unit vector components cma dac \cm1 lac \sm1 cma dac \sm1 lac \cm3 cma dac \cm3 lac \sm3 cma dac \sm3 lac \cm6 cma dac \cm6 lac \sm6 cma dac \sm6 lac \px /load first pos lio \py jmp rop /second pass for other side rot, szf i 2 /no, flag 2 set? rox, jmp . /no, return swap /draw exhaust flame sub \sm6 /x -11 sub \sm6 add \sm1 swap sub \cm6 sub \cm6 add \cm1 dac \px /store position dio \py lac \frc /load frame counter and (4 sza /is it zero? (state switch) jmp ro2 ro1, lac \py /state 1, display at y-1 add \cn1 swap lac \px sub \sn1 disp jmp rox ro2, lac \py /state 2, display at y+5 sub \cn5 swap lac \px add \sn5 disp jmp rox /jump to return /saucer display define sdisp B /display a dot (opt. brightness parameter) dpy -4000 B / request completion pulse term sd, dap sdx clf 5 clf 6 law i 4 dac \sdc sdl, law 5000 /y +/- 10, x +/- 4 szf 6 cma add \py swap law 2000 szf 5 cma add \px disp law 3400 /y +/- 7, x +/- 7 szf 6 cma add \py swap law 3400 szf 5 cma add \px disp law 3400 /y +/- 7, x x+/- 15 szf 6 cma add \py swap law 7400 szf 5 cma add \px disp law sdd /dispatch on \sdc (-4..-1) for passes (set flags) sub \sdc dap sdd idx \sdc /increment counter and jump sdd, jmp . jmp sd1 jmp sd2 jmp sd3 stf 6 /2nd pass jmp sdl sd3, stf 5 /3rd pass jmp sdl sd2, clf 6 /4th pass jmp sdl sd1, lio \py /done, display outer dots lac (12400 /y 0, x + 21 (right side) add \px sdisp 100 lac (-12400 /y 0, x - 21 (left side) add \px ioh sdisp 100 add (1000 swap lac \udc /draw first group of dots at the left sal 1s / dispatch on \udc x 3 (udc = 0..5) for clipping add \udc add (sd4 1 dap \sd4 swap lio \py sd4, jmp . add (1000 /0 nop nop add (1000 /1 ioh sdisp add (1000 /2 ioh sdisp add (1000 /3 ioh sdisp add (1000 /4 ioh sdisp add (3000 /5, display 4 dots ioh sdisp add (1000 ioh sdisp add (1000 ioh sdisp add (1000 ioh sdisp add (3000 /display 4 dots sdisp add (1000 ioh sdisp add (1000 ioh sdisp add (1000 ioh sdisp add (3000 /draw group of remaining dots at the right swap lac \udc /dispatch on \udc x 3 (udc = 0..5) for clipping add (sd5 1 dap sd5 swap lio \py sd5, jmp . jmp sd0 jmp sd0 jmp sd9 jmp sd8 jmp sd7 jmp sd6 sd6, ioh /4 dots sdisp add (1000 sd7, ioh /3 dots sdisp add (1000 sd8, ioh /2 dots sdisp add (1000 sd9, ioh /last dot sdisp sd0, ioh /fetch and clear last completion pulse sdx, jmp . /return constants variables ctb, /start address for code of outline compiler start 4
(~ 2.15 K 18-bit words, 04246 locations incl. variables, + JIT compiled code ~ 1.25 K, 02476 locations.)
— finis —
◀ Previous: Addendum 1: All New Pyrotechnics
▲ Back to the index.
2016-11-10, updated 2025-06-01, Vienna, Austria
www.masswerk.at – contact me.
— This series is part of Retrochallenge 2016/10. —